



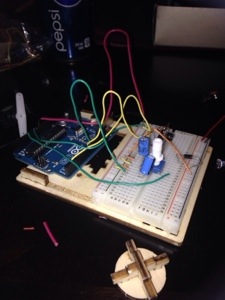
In the images above you will see the construction of the ferris wheel as well as the main 2 sensors on the breadboard.
Coding for my project for all 3 sensors
#include <Servo.h>
Servo myServo;
int const potPin = A0;
int potVal;
int angle;
const int switchPin = 2;
const int motorPin = 9;
int switchState;
int lastswitchState = LOW;
int onOff = LOW;
//LEDsensor lighting coding in which changes the colors of the main LED light.
const int greenLEDPin = 12;
const int redLEDPin = 11;
const int blueLEDPin = 10;
const int redSensorPin = A1;
const int greenSensorPin = A2;
const int blueSensorPin = A3;
int redValue = 0;
int greenValue = 0;
int blueValue = 0;
int redSensorValue = 0;
int greenSensorValue = 0;
int blueSensorValue = 0;
void setup() {
myServo.attach(8);
Serial.begin(9600);
//motor setup
pinMode(motorPin, OUTPUT);
pinMode(switchPin, INPUT);
//LED setup
Serial.begin(9600);
pinMode(greenLEDPin, OUTPUT);
pinMode(redLEDPin, OUTPUT);
pinMode(blueLEDPin, OUTPUT);
}
// Make sure the object and sensor does not loop.
void loop() {
potVal = analogRead(potPin);
Serial.print(“potVal: “);
Serial.print(potVal);
angle = map(potVal, 0, 1023, 0, 179);
Serial.print(“, angle: “);
Serial.print(angle);
myServo.write(angle);
delay(15);
switchState = digitalRead(switchPin);
redSensorValue = analogRead(redSensorPin);
delay(5);
greenSensorValue = analogRead(greenSensorPin);
delay(5);
blueSensorValue = analogRead(blueSensorPin);
Serial.print(“Raw Sensor Value \t Red: “);
Serial.print(redSensorValue);
Serial.print(“\t Green: “);
Serial.print(greenSensorValue);
Serial.print(“\t Blue: “);
Serial.print(blueSensorValue);
redValue = redSensorValue/4;
greenValue = greenSensorValue/4;
blueValue = blueSensorValue/4;
Serial.print(“mapped Sensor Value \t Red: “);
Serial.print(redValue);
Serial.print(“\t Green: “);
Serial.print(greenValue);
Serial.print(“\t Blue: “);
Serial.print(blueValue);
analogWrite(redLEDPin, redValue);
analogWrite(greenLEDPin, greenValue);
analogWrite(blueLEDPin, blueValue);
//this is for the motor code ON/OFF
if (switchState == HIGH && lastswitchState == LOW) {
if(onOff == LOW) {
onOff = HIGH;
}
else if(onOff == HIGH) {
onOff = LOW;
}
lastswitchState == HIGH;
if (switchState == LOW) {
lastswitchState = LOW;
}
}
digitalWrite(motorPin, onOff);
}


